兵器・テクノロジー2
BMI(ブレインマシンインターフェース)
元々は医療目的で進んだ技術体系である。負傷者が使用する“義肢”などを操作する際に脳内に埋め込まれた機器を通じて思考によって“感覚的”に行えるようにしたものである。
この技術は徐々に兵器分野への転用が開始され、第三世代ヘキサギア隆盛の現在においてはアーマータイプ:ポーンA1などにも採用されている。2.5世代型ヘキサギアに用いられていた頃に比べると医療補助器具として使用する人間が増加、需要も高まったことにより機能を抑えた普及版が登場し、システム自体のコストは比較的抑えられるようになった。
第三世代型ヘキサギアに搭載されたKARMAとのコミュニケーションや各種AIへの指示程度であればBMIを通じて行うこともできる。
最新のBMIの中には義眼に内蔵されたものもあり、脳内に機器を埋め込む必要がなくなった。これは主に眼球を損傷した重篤患者への処置として移植されている。
義眼型は第三世代ヘキサギアの高速戦闘に適した機能を設けられており、例として挙げられるのが視界に捉えた対象物の認識速度向上や至近距離から遠距離まで同時に見渡せる明晰な分解能などである。アーマータイプのコンバットヘルムにも当然備えられた機能ではあるが、戦場では装備が万全な状態ばかりではないため健常者であっても移植を検討する状況もある。
これらの後天的な機能は機動力を売りにしている第三世代型ヘキサギアとの相性が良いが当然ながら機能的な制約もある。複雑な操作が可能なものは肉体と連接(自分の肉体と認識できるもの)しており、なおかつ本来ヒトが持っている四肢などの随意的運動部位のみである。人体と同様の四肢に限って言えば、使いこなせるならば常人を超える運動能力を得ることも可能である。
ヒト型のヘキサギアに企業が固執した要因も、機体形状と操縦者の身体運動機能が類似すること、つまりは人体に似たデザインであることの利点が大きかった。
しかしBMIにのみ頼って機械を操作する事は危険ですらあった。
機械の形態に関わらずこれをすべて思考によって操作するということは使用者の脳神経に多大な負担を強いるという欠点があり、特に四肢及び人外の器官を増設拡張するような機能の操作は使用者の脳神経に最適化という名の変容を強要するからである。
これらは操作性の向上という利点を打ち消して余りある潜在的障害要因として判断され、やがてBMIの活用は補助的な方向へと遷移していった。
ヘキサギアの操作
第二世代型ヘキサギアにおいては戦闘用AI(G2AI)による自動制御とガバナー用の各種インターフェースを通じて機体の操作を行う。あくまでも既存の機械類の延長線上のものであり、フットペダルや操縦桿、モニター情報を複合している。これらの複雑な操作には相応の技術や速度、判断力が求められるため、熟練の域に達するには長期の訓練が必要である。人間の手に相当する作業肢(マニピュレーター)操作は特に複雑な制御を必要とするため殆どの機体では開く、握る程度の簡易的な動作を行うに留まり、その代わりとして打撃を意図した構造強度を優先させている。それでもヒト型という“器物を扱うことに長けている”ことは揺るがない。
2.5世代型と表現される初期型BMIを搭載したモデルは作業肢の操作を脳波で制御しており、より人間に近い動作を可能にした。このBMIの高度化による恩恵は高速戦闘時にも効果を発揮しており、急旋回や緊急回避など“直感的な挙動”を行うことができるが、ヒト型という複雑な機械の制御をすべて脳波で代替することは結局は難しく、ガバナーへの負担も小さくなかった。膨大な情報を並列して処理する戦場において複雑な命令を連続して行うことによる脳のダメージは大きくガバナーの命を急速に蝕んでいった。
そして発展途上ということもあり標準的なシステムとするには非常に高価であったため一部の機体にしか搭載されず、2.5世代型そのものが普及するには至らなかった。
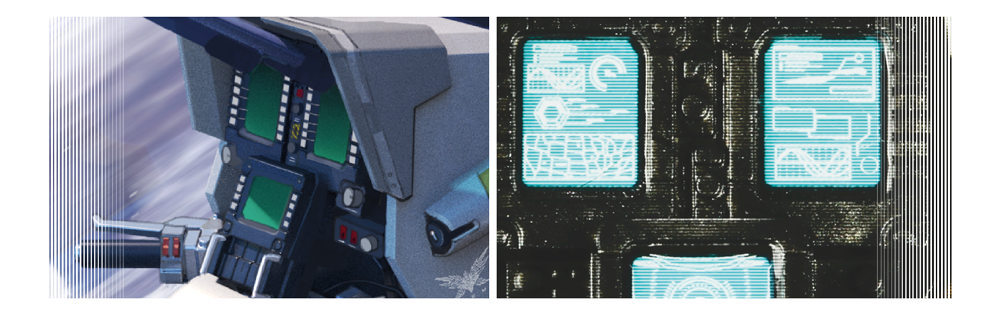
第三世代型ヘキサギアにおいては、操作に用いるための機体側の各種インターフェースは最低限にまとめられている。これはガバナーが纏うアーマータイプのコンバットヘルム側にも必要な情報が表示されることや、BMIの機能によってKARMAとの意思疎通ができること、そして何よりも機体制御を担う人工知能「KARMA」が状況に合わせて自動的に制御できることが大きい。KARMAは自ら思考し、ガバナーが“次にどう動きたいのか”を予測して行動することができるため、ガバナーは目的を共有しておけば操作に掛かるタイムラグを減少し、より連携して戦うことができる。一方で獣性が高まったゾアテックスは強力な戦闘能力を獲得すると同時にその制御を難しくする。こういった場合にはガバナーがそのゾアテックスを最大限に活用するための戦術に切り替える必要がある。ガバナーとKARMAは“生き残る”という共通の目標に対し互いに協力しあい“人機一体”となって戦場を駆けるのである。
余談ではあるが、殆どの第三世代型ヘキサギアではコックピットが装甲で覆われていない。
アーマータイプの発展も大きく寄与してはいるが、高速戦闘に特化した第三世代型はその高い機動力を実現するためメーカー純正の状態では多足歩行の機体がほとんどである。このためヒト型の特徴であった作業肢による装備選択の拡張性を排除しており、その点を戦闘中でも頻繁に乗降するガバナーとの連携により解決しているのである。
また機体特性としてシステムコンバートによる「ビークルモード」を持つ機体においてもBMIは同様に機能するが、一般的に特殊な動作を行わない状況では通常のビークルと同じような方法で操作する者が多い。これは少しでもガバナーのストレスを軽減するためであり、あくまでも標準的な仕様でしかない。
ドロイド
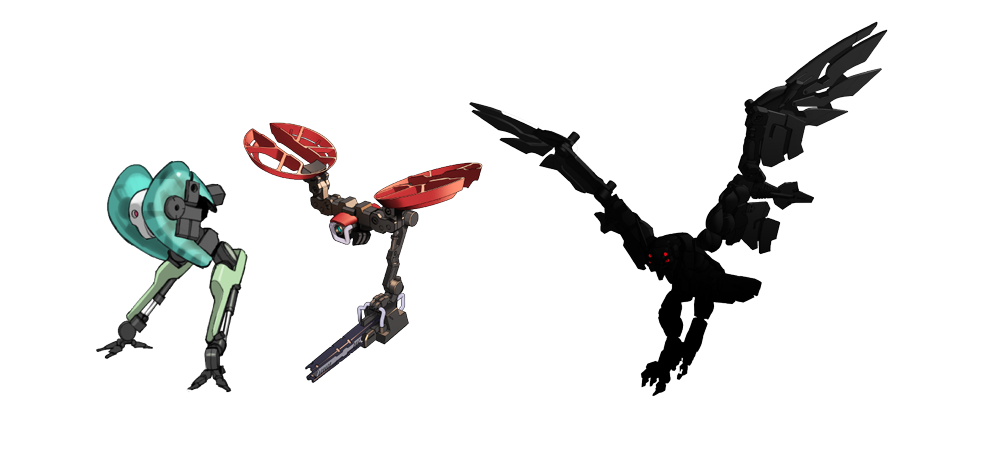
旧時代より発展を続けてきた補助作業機械の分野として「ドロイド」がある。これは作業員による直接操作を必要としない無人機で、多くは作業目的に特化した非人型となっており、人間より小さなものから大型重機サイズまで形態は様々である。
第一世代と呼ばれるヘキサギアのうち幾つかもこのドロイドという分野に含まれている。各種現場作業を補佐する目的で生み出された汎用の作業用AIによって制御されており、多くは各々の作業区内に構築されたネットワーク上で連接し、各都市において人類に代わる労働力として発展してきた。しかしながら時代が移り変わるとその制御AIが問題視されるようになる。バルクアーム系やスケアクロウなど第二世代型の作業用ヘキサギアで見られた様に汎用の制御用AIはSANATによるネットワーク干渉を防ぐことができず制御を奪われる可能性が高かった為、外部との通信やネットワークの運用自体に大きな制限を必要とした。これはより安価な作業機械であるドロイドも例に漏れず、その制御には常に不安が付きまとうのであった。
これに対しリバティー・アライアンスはKARMAと呼ばれる独自のネットワークを持ち、かつSANATによる一方的な干渉を防ぐことを可能にした新型AIの導入することで対抗している。現在アースクライン・バイオメカニクスをはじめとする企業では現場を管理するKARMAの下に汎用AIの現場ドロイドなどを設定し、その管理・制御はすべてKARMAのネットワークを通じて行う様にシステムを構成している。
そしてヘキサグラムを複雑に組み合わせて運用する「ヘキサギア」と呼ばれる工業規格においては高度なAIを搭載している機体、即ち第三世代型に向けて開発されたKARMAやSANAT代理体の方が優位であることは明白である。
ドロイドはKARMAを搭載したヘキサギアと明確に分けて考えられる。動力こそヘキサグラムを用いるものもあるが、その機体に直接KARMAを搭載することはなくKARMAを搭載した母機によって制御される“遠隔操作する外部端末”として扱われている。単なる作業機であるこれらがゾアテックスを実装することはなく、MSGVFが保有するハイドストームにおいてもそれは例外ではない。戦闘用ヘキサギアに搭載されたドロイドは母機が入り込めないような狭隘な空間の探索や単独行動するガバナーの支援、通信の中継などを目的としている。